







डाव्या हाताचा नियम, उजव्या हाताचा नियम, उजव्या हाताचा स्क्रू नियम.डाव्या हाताचा नियम, हा मोटर रोटेशनच्या शक्तीच्या विश्लेषणाचा आधार आहे.सोप्या भाषेत सांगायचे तर, हे चुंबकीय क्षेत्रामध्ये विद्युत्-वाहक कंडक्टर आहे, जो बलाने प्रभावित होईल.
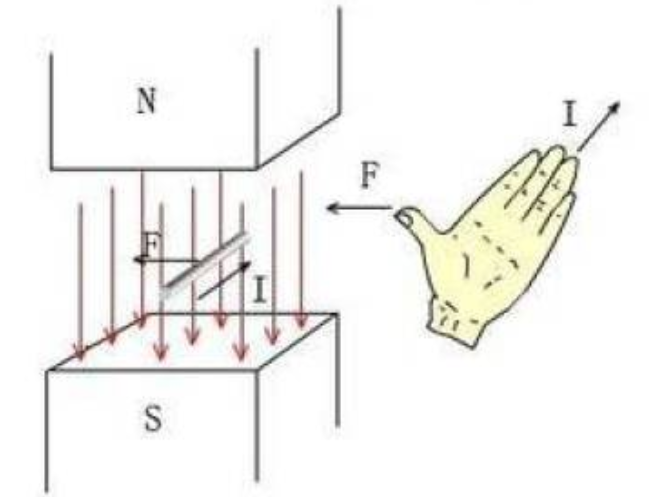
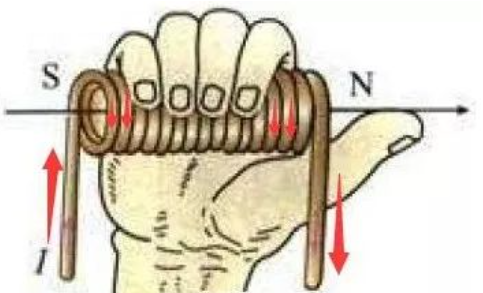
चुंबकीय क्षेत्र रेषा हस्तरेखाच्या पुढील भागातून जाऊ द्या, बोटांची दिशा ही विद्युत् प्रवाहाची दिशा आहे आणि अंगठ्याची दिशा चुंबकीय शक्तीची दिशा आहे.बलाचा कर्षण इलेक्ट्रोमोटिव्ह फोर्स निर्माण करण्यासाठी चुंबकीय क्षेत्र रेषा कापतो.
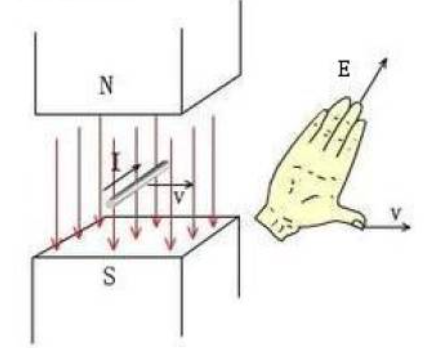
चुंबकीय क्षेत्र रेषा हस्तरेखातून जाऊ द्या, अंगठ्याची दिशा ही गतीची दिशा आहे आणि बोटाची दिशा ही व्युत्पन्न इलेक्ट्रोमोटिव्ह शक्तीची दिशा आहे.प्रेरित इलेक्ट्रोमोटिव्ह शक्तीबद्दल का बोलायचे?तुम्हालाही असाच अनुभव आहे की नाही हे मला माहीत नाही.जेव्हा तुम्ही मोटरच्या थ्री-फेज वायर्स एकत्र करता आणि हाताने मोटर फिरवता तेव्हा तुम्हाला दिसून येईल की प्रतिकार खूप मोठा आहे.कारण मोटरच्या रोटेशन दरम्यान इंडक्शन होते.इलेक्ट्रोमोटिव्ह फोर्स विद्युत प्रवाह निर्माण करतो आणि चुंबकीय क्षेत्रामध्ये कंडक्टरमधून वाहणारा विद्युत् प्रवाह रोटेशनच्या दिशेच्या विरुद्ध बल निर्माण करेल आणि प्रत्येकाला असे वाटेल की रोटेशनला खूप प्रतिकार आहे.
थ्री-फेज वायर वेगळे केले जातात आणि मोटार सहजपणे वळवता येते
थ्री-फेज लाईन्स एकत्रित केल्या आहेत आणि मोटरचा प्रतिकार खूप मोठा आहे.उजव्या हाताच्या स्क्रूच्या नियमानुसार, उर्जायुक्त सोलेनॉइड उजव्या हाताने धरा, जेणेकरून चार बोटे करंट सारख्याच दिशेने वाकतील, त्यानंतर अंगठ्याने निर्देशित केलेला शेवट ऊर्जायुक्त सोलनॉइडचा एन ध्रुव आहे.
हा नियम उर्जायुक्त कॉइलच्या ध्रुवीयतेचा न्याय करण्यासाठी आधार आहे आणि लाल बाणाची दिशा वर्तमान दिशा आहे.तीन नियम वाचल्यानंतर, मोटर रोटेशनच्या मूलभूत तत्त्वांवर एक नजर टाकूया.पहिला भाग: DC मोटर मॉडेल आम्हाला हायस्कूल भौतिकशास्त्रात अभ्यासलेल्या DC मोटरचे मॉडेल सापडते आणि चुंबकीय सर्किट विश्लेषण पद्धतीद्वारे साधे विश्लेषण केले जाते.
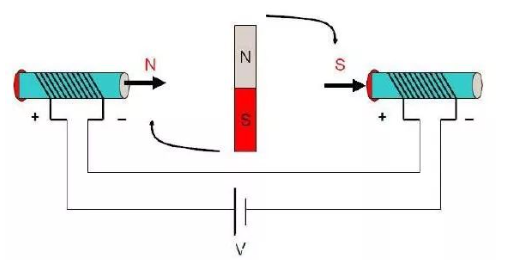
स्थिती 1 जेव्हा दोन्ही टोकांना कॉइलवर विद्युतप्रवाह लागू केला जातो, तेव्हा उजव्या हाताच्या स्क्रूच्या नियमानुसार, लागू चुंबकीय इंडक्शन तीव्रता B (जाड बाणाने दर्शविल्याप्रमाणे) तयार होईल आणि मध्यभागी रोटर तयार करण्याचा प्रयत्न करेल. त्याच्या अंतर्गत चुंबकीय प्रेरण रेषेची दिशा शक्यतोपर्यंत.बाह्य चुंबकीय क्षेत्र रेषेची दिशा सर्वात लहान बंद चुंबकीय क्षेत्र रेषा लूप तयार करण्यासाठी सुसंगत आहे, जेणेकरून आतील रोटर घड्याळाच्या दिशेने फिरेल.जेव्हा रोटरच्या चुंबकीय क्षेत्राची दिशा बाह्य चुंबकीय क्षेत्राच्या दिशेला लंब असते तेव्हा रोटरचा रोटेशनल टॉर्क सर्वात मोठा असतो.लक्षात घ्या की "क्षण" हा सर्वात मोठा आहे, "बल" नाही.हे खरे आहे की जेव्हा रोटरचे चुंबकीय क्षेत्र बाह्य चुंबकीय क्षेत्राच्या दिशेने असते तेव्हा रोटरवरील चुंबकीय शक्ती सर्वात मोठी असते, परंतु यावेळी रोटर क्षैतिज स्थितीत असतो आणि बल आर्म 0 असतो आणि त्यातील अर्थात ते फिरणार नाही.जोडण्यासाठी, क्षण हे बल आणि बल आर्मचे उत्पादन आहे.त्यापैकी एक शून्य असल्यास, उत्पादन शून्य आहे.जेव्हा रोटर क्षैतिज स्थितीकडे वळतो, जरी तो यापुढे रोटेशनल टॉर्कने प्रभावित होत नसला तरी, जडत्वामुळे ते घड्याळाच्या दिशेने फिरत राहील.यावेळी, खालील आकृतीत दर्शविल्याप्रमाणे, दोन सोलेनोइड्सची वर्तमान दिशा बदलल्यास, रोटर फिरत राहील.घड्याळाच्या दिशेने पुढे वळा
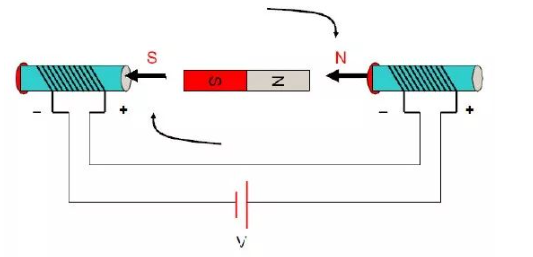
स्थिती 2 मध्ये, दोन सोलेनोइड्सची वर्तमान दिशा सतत बदलली जाते आणि आतील रोटर फिरत राहील.विद्युत् प्रवाहाची दिशा बदलण्याच्या या क्रियेला कम्युटेशन म्हणतात.साइड टीप: केव्हा बदलायचे हे फक्त रोटरच्या स्थितीशी संबंधित आहे आणि इतर कोणत्याही प्रमाणाशी थेट संबंधित नाही.भाग 2: थ्री-फेज टू-पोल इनर रोटर मोटर साधारणपणे, स्टेटरच्या थ्री-फेज विंडिंग्समध्ये स्टार कनेक्शन मोड आणि डेल्टा कनेक्शन मोड असतो आणि "थ्री-फेज स्टार कनेक्शनचा दोन-दोन कंडक्शन मोड" हा सर्वात सामान्यतः आहे. वापरले, जे येथे वापरले आहे.हे मॉडेल साध्या विश्लेषणासाठी वापरले जाते.
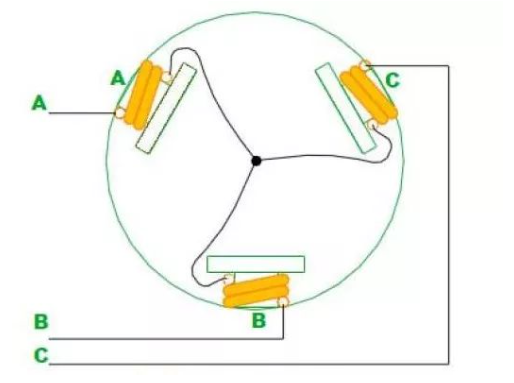
स्टेटर विंडिंग्स कसे जोडलेले आहेत हे वरील आकृती दाखवते (रोटर काल्पनिक द्वि-ध्रुव चुंबक म्हणून दाखवले जात नाही), आणि तीन विंडिंग्स मध्यवर्ती कनेक्शन बिंदूद्वारे “Y” आकारात एकत्र जोडलेले आहेत.संपूर्ण मोटार A, B, C या तीन तारांकडे जाते. जेव्हा ते दोन बाय दोन असे ऊर्जावान होतात तेव्हा AB, AC, BC, BA, CA, CB अशी 6 केस असतात.हे क्रमाने आहे याची नोंद घ्या.
आता मी पहिल्या टप्प्याकडे पाहतो: एबी फेज उत्साही आहे
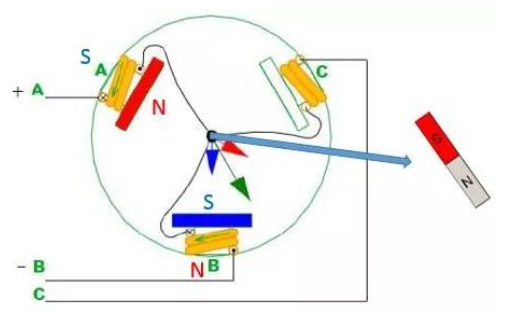
जेव्हा AB फेज उर्जावान होतो, तेव्हा A ध्रुव कॉइलद्वारे व्युत्पन्न केलेल्या चुंबकीय क्षेत्र रेषेची दिशा लाल बाणाने दर्शविली जाते आणि B ध्रुवाने निर्माण केलेल्या चुंबकीय क्षेत्र रेषेची दिशा निळ्या बाणाने दर्शविली जाते, नंतर दिशा परिणामी बल हिरव्या बाणाने दर्शविला जातो, नंतर दोन-ध्रुव चुंबक आहे असे गृहीत धरून, एन-ध्रुव दिशा हिरव्या बाणाने दर्शविलेल्या दिशेशी एकरूप होईल त्यानुसार “मध्यभागी रोटर ठेवण्याचा प्रयत्न करेल. त्याच्या अंतर्गत चुंबकीय क्षेत्र रेषांची दिशा बाह्य चुंबकीय क्षेत्र रेषांच्या दिशेशी सुसंगत आहे”.सी साठी म्हणून, सध्यातरी त्याचा त्याच्याशी काहीही संबंध नाही.
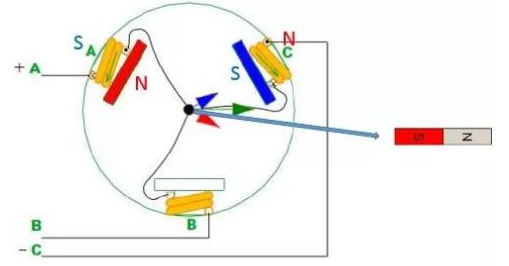
स्टेज 2: AC फेज एनर्जाइज्ड
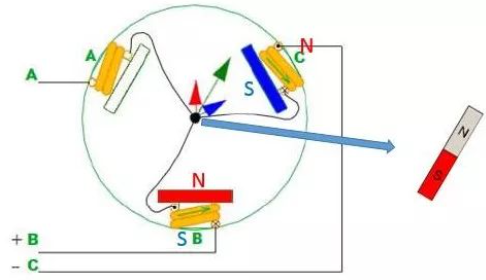
तिसरा टप्पा: बीसी फेज विद्युतीकरण
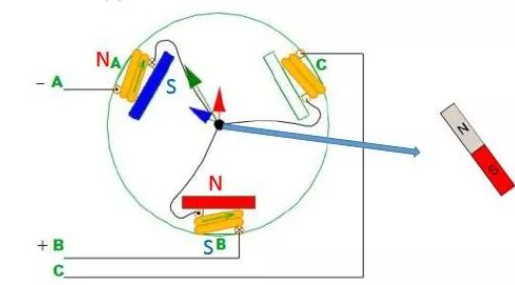
तिसरा टप्पा: बीए टप्पा उत्साही आहे
इंटरमीडिएट मॅग्नेट (रोटर) चे स्टेट डायग्राम खालीलप्रमाणे आहे: प्रत्येक प्रक्रिया रोटर 60 अंश फिरते

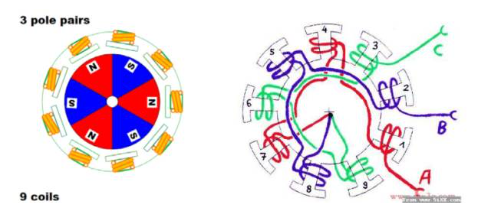
संपूर्ण रोटेशन सहा प्रक्रियांमध्ये पूर्ण केले जाते, त्यापैकी सहा कम्युटेशन केले जातात.तिसरा भाग: थ्री-फेज मल्टी-वाइंडिंग मल्टी-पोल इनर रोटर मोटर चला अधिक क्लिष्ट बिंदू पाहू.आकृती (a) ही तीन-फेज नऊ-वाइंडिंग सिक्स-पोल (थ्री-फेज, नऊ-वाइंडिंग, सिक्स-पोल) मोटर आहे.विरुद्ध ध्रुव) आतील रोटर मोटर, त्याचे वळण कनेक्शन आकृती (b) मध्ये दर्शविले आहे.हे आकृती (b) वरून पाहिले जाऊ शकते की तीन-टप्प्याचे विंडिंग देखील मध्यवर्ती बिंदूवर एकत्र जोडलेले आहेत, जे एक तारा कनेक्शन देखील आहे.सर्वसाधारणपणे, मोटरच्या विंडिंगची संख्या कायम चुंबकाच्या ध्रुवांच्या संख्येशी विसंगत असते (उदाहरणार्थ, 6 विंडिंग आणि 6 खांबांच्या ऐवजी 9 विंडिंग आणि 6 पोल वापरले जातात), जेणेकरून स्टेटरचे दात रोखता येतील आणि रोटरचे चुंबक आकर्षित आणि संरेखित करण्यापासून.
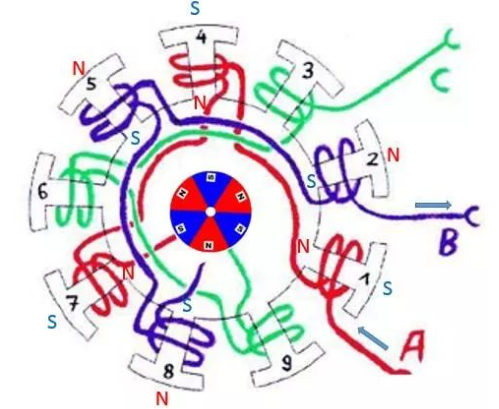
त्याच्या गतीचे तत्त्व असे आहे: रोटरचा N ध्रुव आणि एनर्जिज्ड वाइंडिंगचा S ध्रुव संरेखित करण्याची प्रवृत्ती आहे, आणि रोटरचा S ध्रुव आणि ऊर्जायुक्त वळणाचा N ध्रुव संरेखित करण्याची प्रवृत्ती आहे.म्हणजेच S आणि N एकमेकांना आकर्षित करतात.लक्षात घ्या की ते मागील विश्लेषण पद्धतीपेक्षा वेगळे आहे.बरं, त्याचे पुन्हा विश्लेषण करण्यात मदत करूया.पहिला टप्पा: AB फेज विद्युतीकृत आहे
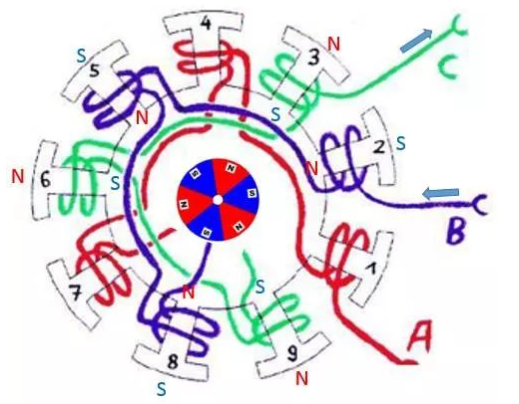
स्टेज 2: AC फेज एनर्जाइज्ड

तिसरा टप्पा: बीसी फेज विद्युतीकरण
पोस्ट वेळ: ऑक्टोबर-21-2022